المعلمات الأساسية وخصائص المرحلات الكهرومغناطيسية
 يُطلق على الجهاز الكهربائي الذي يطبق قانون التحكم في الترحيل اسم الترحيل ... في المرحل ، عندما يتم تغيير معلمة التحكم (الإدخال) بسلاسة إلى قيمة معينة محددة ، تتغير معلمة (الإخراج) الخاضعة للرقابة بشكل مفاجئ. أيضًا ، يجب أن تكون إحدى هذه المعلمات على الأقل كهربائية.
يُطلق على الجهاز الكهربائي الذي يطبق قانون التحكم في الترحيل اسم الترحيل ... في المرحل ، عندما يتم تغيير معلمة التحكم (الإدخال) بسلاسة إلى قيمة معينة محددة ، تتغير معلمة (الإخراج) الخاضعة للرقابة بشكل مفاجئ. أيضًا ، يجب أن تكون إحدى هذه المعلمات على الأقل كهربائية.
عمل الأجهزة الوظيفية التتابع الكهرومغناطيسي يمكن تتبعها وفقًا للرسم التخطيطي في الشكل. 1. يقوم الجسم المستقبل A بتحويل قيمة الإدخال (الجهد) Uin المقدمة إلى الملف 2 من الدائرة المغناطيسية 1 إلى قيمة وسيطة ، أي في القوة الميكانيكية للمرساة 3. تعمل القوة الميكانيكية للمرساة FЯ على نظام التلامس الخاص بالجسم التنفيذي ب. القيمة الوسيطة - قوة المرساة FЯ ، تتناسب مع قيمة الإدخال Uin ، تتم مقارنتها بـ القيمة المعطاة للقوة Fpr التي طورها ربيع 9 للجسم الوسيط B. عندما Uin <Uav ، Fya
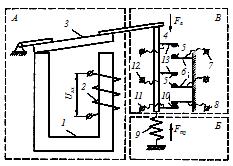 أرز. 1 مخطط التتابع الكهرومغناطيسي
أرز. 1 مخطط التتابع الكهرومغناطيسي
في عملية التشغيل ، يميز الترحيل الكهرومغناطيسي على مقياس زمني أربع مراحل: فترة (وقت) التشغيل tav ، وفترة العمل twork ، وفترة (وقت) إيقاف التشغيل ، وفترة (وقت) الراحة tp (الشكل 2).
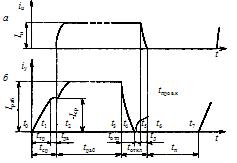
أرز. 2. الاعتماد على كميات المخرجات (أ) والمخرجات (ب) في الوقت المحدد
فترة تشغيل مرحل كهرومغناطيسي
 تتضمن فترة الاستجابة الفاصل الزمني من اللحظة التي تبدأ فيها إشارة الإدخال في التأثير على هيئة المراقبة حتى تظهر الإشارة في الدائرة التي يتم التحكم فيها. يتوافق جزء محور الإحداثي tav = t2 –t0 مع هذه الفترة في الشكل. 2 ، ب. في الوقت الحالي t0 ، يزداد التيار في ملف الترحيل إلى قيمة تبدأ عندها القوة الكهرومغناطيسية التي تعمل على المحرك في معارضة قوة الزنبرك Fm (القوة الميكانيكية) للجسم الوسيط. ثم تسمى قيمة الإدخال قيمة القبول.
تتضمن فترة الاستجابة الفاصل الزمني من اللحظة التي تبدأ فيها إشارة الإدخال في التأثير على هيئة المراقبة حتى تظهر الإشارة في الدائرة التي يتم التحكم فيها. يتوافق جزء محور الإحداثي tav = t2 –t0 مع هذه الفترة في الشكل. 2 ، ب. في الوقت الحالي t0 ، يزداد التيار في ملف الترحيل إلى قيمة تبدأ عندها القوة الكهرومغناطيسية التي تعمل على المحرك في معارضة قوة الزنبرك Fm (القوة الميكانيكية) للجسم الوسيط. ثم تسمى قيمة الإدخال قيمة القبول.
الفترة الأولية تتوافق مع المقطع ttr = t1 - t0. في الوقت t1 ، يبدأ المحرك للمغناطيس الكهربائي للترحيل في التحرك. خلال tdv = t2 - t1 ، يتحرك المرساة ، متغلبًا على مقاومة الجسم الوسيط B (انظر الشكل 1) وتنشيط الجسم التنفيذي C.
في نهاية شوط المحرك ، تغلق اتصالات المحرك ، ويبدأ تيار الحمل في (الشكل 2 ، أ) في الزيادة من الصفر إلى قيمة التوازن. تسمى قيمة الإدخال التي يبدأ عندها التحكم في دائرة الإخراج بقيمة القبول (Iav). تسمى القوة Psr المقابلة لـ Isr بالقوة المشغلة.
زمن الاستجابة t cf = ttr + tdv.
يختلف وقت استجابة المرحلات الكهرومغناطيسية من 1-2 إلى 20 مللي ثانية. توفر مرحلات الوقت الكهرومغناطيسية تأخيرًا يصل إلى 10 ثوانٍ.
لتقدير وقت استجابة التتابع ، يجوز استخدام التعبير
t cf = t1kz-bm –a ،
حيث t1 هو وقت الاستجابة لعامل أمان معين ks والعامل m = 1 ؛ أ ، ب - المعاملات التي يتم تحديدها اعتمادًا على نوع المرحل وقيم kz و m.
بالنسبة للمرحلات عالية السرعة عند kz = 1.5¸2 ، تقترب قيمة المعامل a من الوحدة. بالنسبة للمرحلات العادية مع k z = 1.5¸3 ، القيمة a = 0.25¸0.95 ، تكون قيمة المعامل b عادةً في النطاق 1.4-1.6.
فترة تشغيل التتابع الكهرومغناطيسي
 تتضمن فترة العمل الفترة الزمنية twork = t3 - t2 ، أي الوقت من لحظة التحكم في دائرة الإخراج t2 إلى لحظة إنهاء التأثير على العضو الحساس لإشارة الإدخال t3. يبدأ التيار في الارتفاع إلى قيمة ثابتة لـ Iwork (الشكل 2 ، ب) - هذه هي قيمة العمل لقيمة الإدخال ، والتي تضمن التشغيل الموثوق به للترحيل.
تتضمن فترة العمل الفترة الزمنية twork = t3 - t2 ، أي الوقت من لحظة التحكم في دائرة الإخراج t2 إلى لحظة إنهاء التأثير على العضو الحساس لإشارة الإدخال t3. يبدأ التيار في الارتفاع إلى قيمة ثابتة لـ Iwork (الشكل 2 ، ب) - هذه هي قيمة العمل لقيمة الإدخال ، والتي تضمن التشغيل الموثوق به للترحيل.
تسمى النسبة Iwork / Icr = kz عامل الأمان في العمل.
لتوصيف سعة التحميل الزائد للعنصر الحساس للترحيل ، يتم استخدام قيمة كمية الإدخال ، والتي تسمى القيمة الحدية لكمية التشغيل Ioperating.max.
حدود قيمة العمل - هذه هي القيمة التي يمكن أن يتحملها العضو الحساس لفترة زمنية قصيرة طبيعية. ومع ذلك ، فإن قيمة هذه القيمة غير مقبولة عندما يعمل المرحل في الوضع العادي بسبب حالة القوة الكهربائية أو الميكانيكية أو التسخين.
يستخدم مفهوم قوة التحكم Ru لتوصيف قدرة تحمل الحمولة لمحرك الترحيل. قوة التحكم هي القوة الموجودة في الدائرة التي يتم التحكم فيها والتي يمكن للمحرك نقلها لفترة طويلة.
فترة رحلة التتابع الكهرومغناطيسي
 تحتوي فترة الإيقاف على الفترة الزمنية toff = t6 - t3 ، أي الوقت من لحظة توقف التأثير على العضو المدرك t3 إلى اللحظة التي ينخفض فيها التيار في الدائرة المتحكم بها إلى الصفر (الشكل 16 ، أ).
تحتوي فترة الإيقاف على الفترة الزمنية toff = t6 - t3 ، أي الوقت من لحظة توقف التأثير على العضو المدرك t3 إلى اللحظة التي ينخفض فيها التيار في الدائرة المتحكم بها إلى الصفر (الشكل 16 ، أ).
تتضمن فترة الإيقاف فترة الإصدار t4 - t3 التي يكون فيها التتابع متوقفًا. ينخفض \ u200b \ u200b الحالي في ملف الترحيل إلى الصفر (الشكل 2 ، ب). خلال هذه الفترة ، تتجاوز قوة الزنبرك المقابلة (القوة الميكانيكية) القوة الكهرومغناطيسية ، أي Fm> Fe ويتم تحرير المحرك.
بعد تحديد فشل جهة الاتصال (الفاصل الزمني tc = t5 - t4) ، تفتح جهات اتصال الترحيل ويتم إشعال قوس بينهما ، والذي ينطفئ بعد الوقت td = t6 - t5. خلال الفترة td ، يتناقص التيار في الدائرة المتحكم بها من In إلى الصفر (الشكل 2 ، أ).
وقت الإيقاف t t = tp + tc + td.
تتميز فترة التعثر بعامل الاسترداد ، وهو نسبة تيار السقوط Iotp إلى تيار الالتقاط Iav: kv = Iotp / Icr.
عادةً ، بالنسبة لمرحلات حماية نظام الطاقة ومرحلات التحكم التي تتحكم في معلمة الإدخال ضمن حدود ضيقة ، يجب أن يكون kv أقرب إلى الوحدة.
فترة راحة التتابع الكهرومغناطيسي
فترة الراحة هي الفترة الزمنية tp = t7 - t6.
تتميز فترة الكمون بمعلمة تسمى القيمة غير التشغيلية ، وهي أكبر قيمة لكمية الإدخال التي تضمن عدم تشغيل المرحل أو تعليقه. وقت إيقاف التشغيل أقصر من وقت بدء التشغيل ووقت الإصدار.
تسمى نسبة قوة التحكم إلى قوة التشغيل الكسب ، ku = Py / Pcr.
يتم تحديد عدد مرات البدء لكل وحدة زمنية بقيمة تتناسب عكسياً مع وقت الدورة:
f = 1 / tq = 1 / (Tsrab + Trob + Toff + TNS)
لاكوتا أو.